
Soft Mechanical Systems
Our laboratory conducts research on the design, fabrication, and control of novel soft actuators, artificial muscles, and soft sensors using flexible materials. We are also engaged in the development of soft robots that integrate these components, aiming to create next-generation robots that are safe, gentle, and capable of smooth, human-friendly motion.
 |
|
|---|
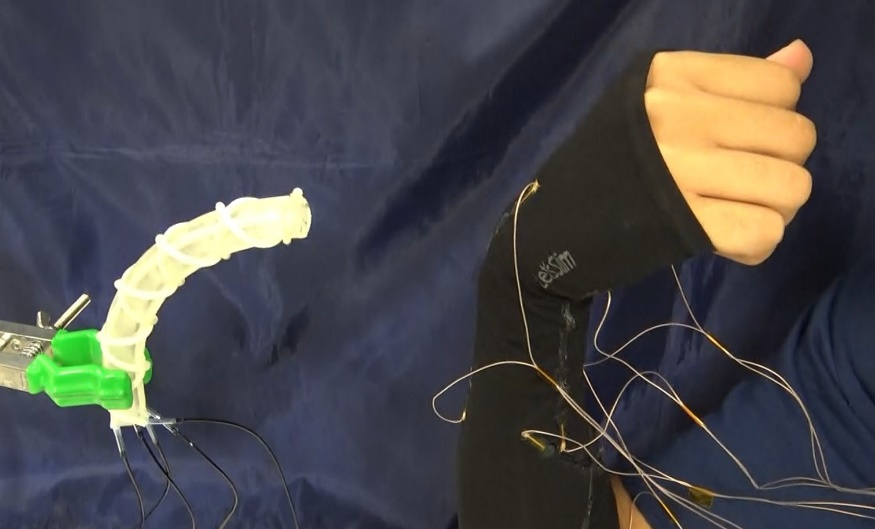
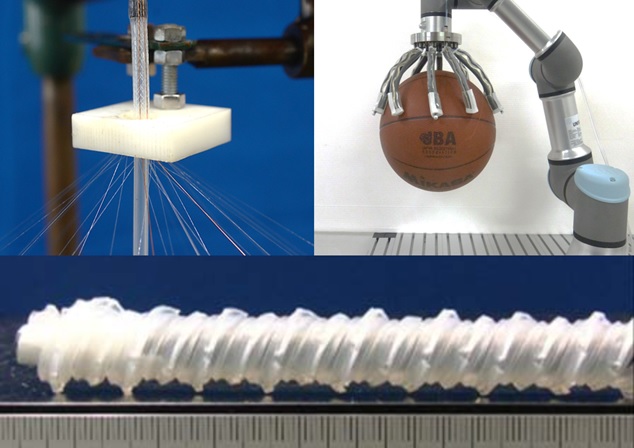
A pneumatic artificial muscle is a soft and high-power actuator that is composed of rubber material and fibers and driven by air pressure. In addition to basic research on miniaturization and functionalization of the pneumatic artificial muscle, we are also developing applications of the pneumatic artificial muscle, such as a soft robot arm, a prosthetic hand, and so on.