
Biorobotics
Biorobotics
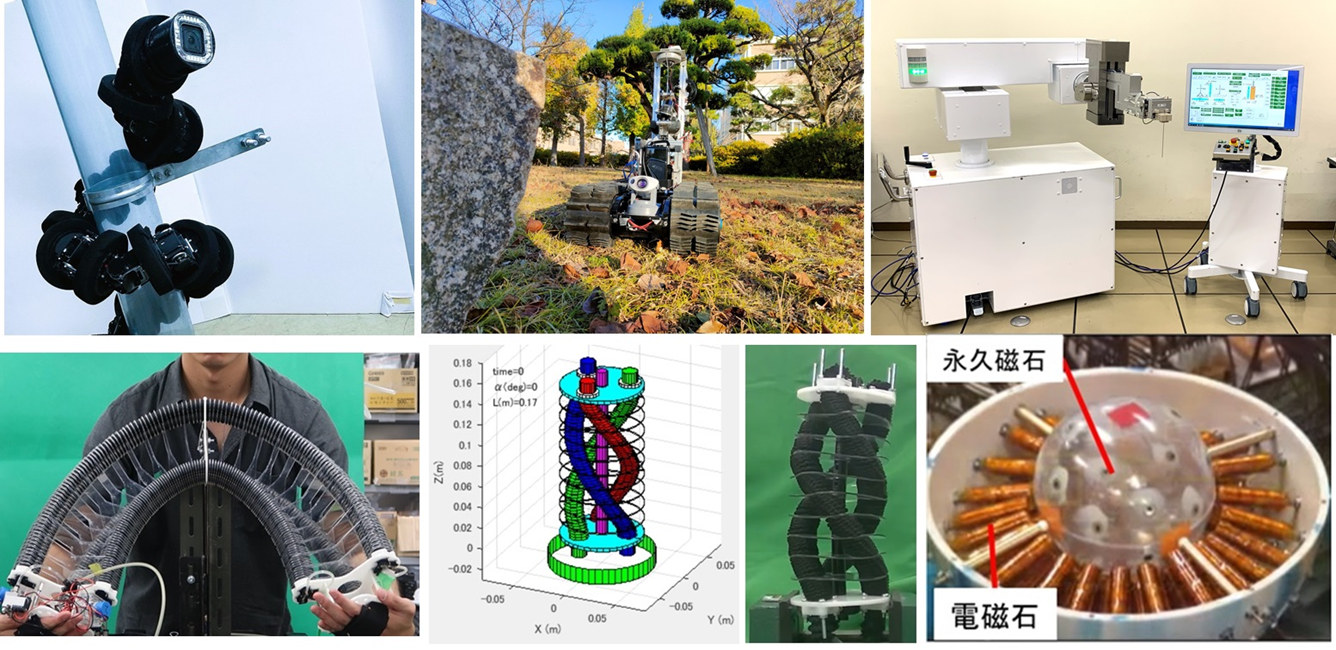
We research and develop robots that are highly adaptable to the environment like living organisms, robots that cooperate with humans, and robots that can be applied to humans. For example, we are researching and developing a snake-like robot that can move through various environments like a biological snake, and a rescue robot for disaster response. We are also developing a remote-controlled needle-puncturing medical robot and a rehabilitation device using soft actuators.
 |
|
|---|

Snake robot to investigate narrow space
I am conducting research and development of a snake robot that mimics a biological snake. My dream is to develop a robot that can survey the interior of complex and narrow structures that have collapsed due to a large-scale disaster. I am also working on a rescue robot that gathers information from remote locations and a medical robot that performs needle puncture under CT fluoroscopy.
|
An example of developed rehabilitation device
We are aiming to develop soft actuators using rubber and textile materials that enable flexible movements and high human friendly. Additionally, soft actuators with not only flexible but also generated force to assist human movements is also developed. The rehabilitation device is applied by using these soft actuators for the Quality Of Life (QOL). We are developing a spherical motor and a reducer that can rotate in any direction.