
Adaptive Autonomous Systems
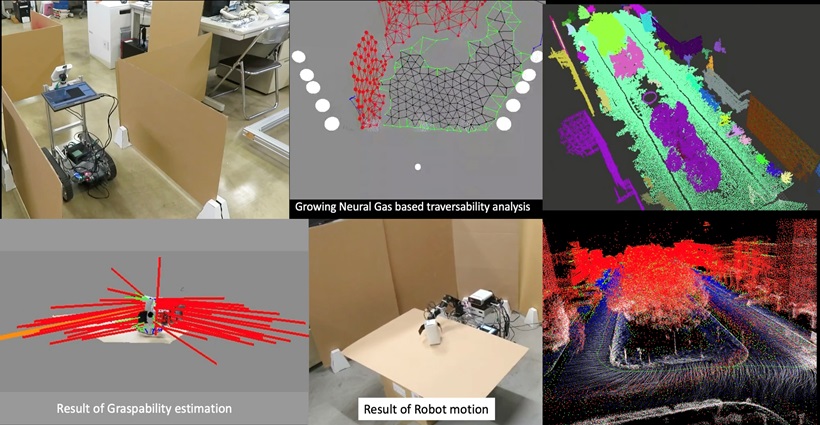
We are conducting research on space perception and recognition to realize robots capable of executing autonomously in various environments. As a methodological foundation for these technologies, we are engaged in fundamental research on computational intelligence, represented by neural networks and evolutionary computation. Furthermore, by applying the developed methods to autonomous mobile robots and verifying their effectiveness, we aim to establish autonomous systems that function effectively in real-world environments.
 |
|
|---|
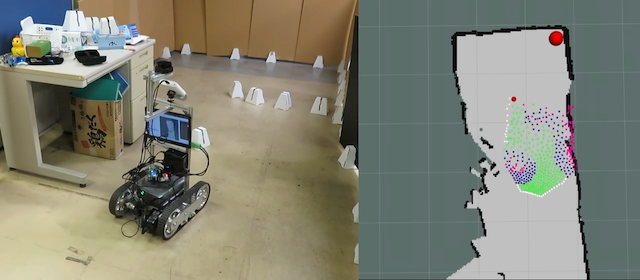
For realizing an autonomous robot that can adaptively execute given tasks in any environment, we are conducting fundamental research on self-growing neural networks. Furthermore, we aim to apply the findings of this research to spatial recognition in order to realize an adaptive perceptual system for the autonomous robot.