
適応自律システム学
様々な環境で自律的に行動できるロボットの実現に向けて、空間知覚や認識に関する研究を行っています。これらの技術を支える方法論として、ニューラルネットワークや進化計算に代表される計算知能の基礎研究に取り組んでいます。また、構築した手法を自律移動ロボットに適用して検証することで、実環境で有効に機能する自律システムの確立を目指しています。
 |
|
|---|
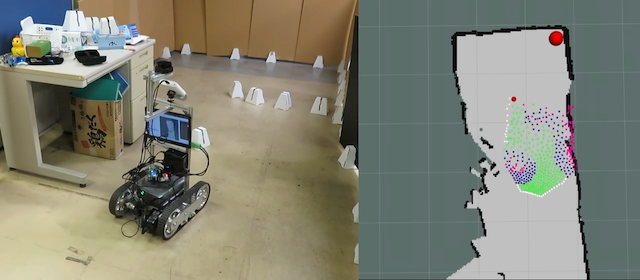
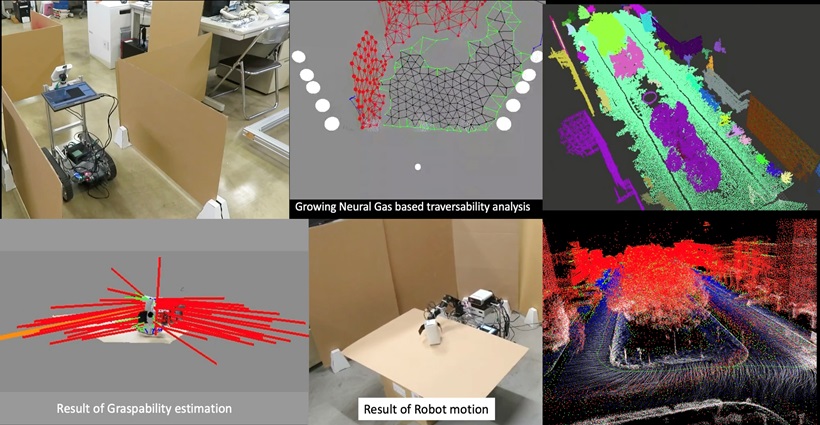
自律移動ロボットと3次元空間知覚
どのような環境でも適応的に行動できる自律ロボットを目指し,未知なデータに対しても学習を行うことができる自己増殖学型ニューラルネットワークに関する基礎研究をしています.さらに,基礎研究をロボットの空間認識に活用し,様々な環境で空間認識可能な知覚システムの実現を目指しています.
