
ソフトメカニカルシステム学
本研究室では、柔軟材料を用いた新たなソフトアクチュエータ、人工筋肉、ソフトセンサなどの設計・製作・制御に関する研究を行うとともに、それらを組み合わせたソフトロボットの構築にも取り組んでいます。安全でしなやかな動作を実現する次世代ロボットの創出を目指して研究を推進しています。
 |
|
|---|
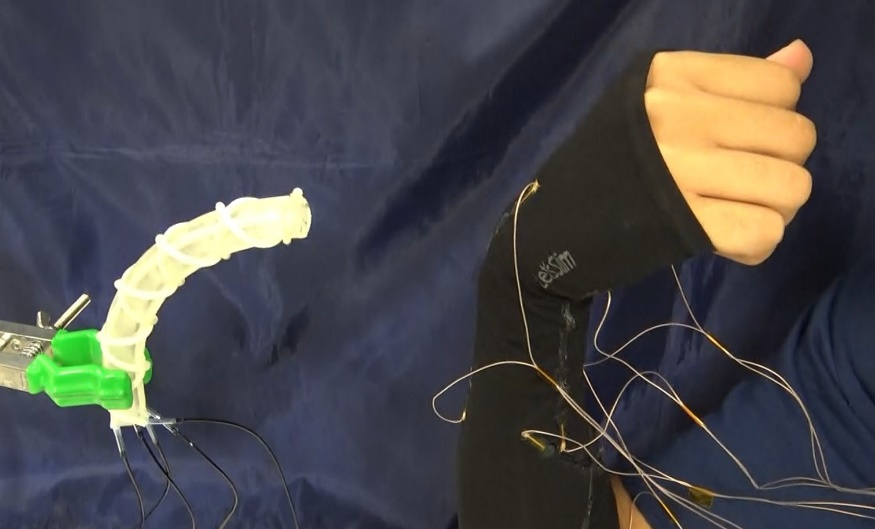
人の腕と連動して多方向に湾曲できる人工筋肉で構成されたソフトロボットアーム
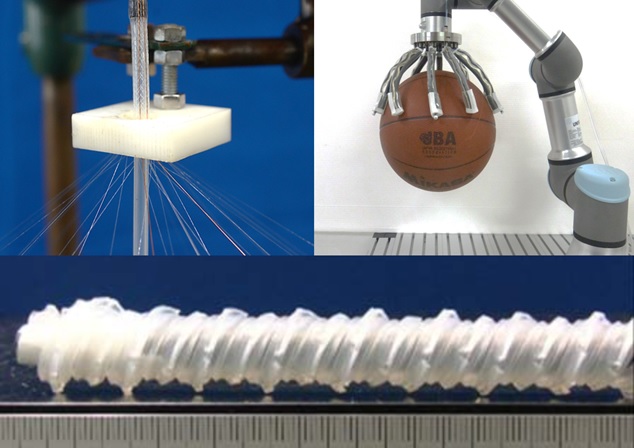
空気圧人工筋肉とは、ゴムと繊維で構成され空気圧によって駆動する「柔らかく」「力強い」アクチュエータです。小型化・集積化・高機能化など空気圧人工筋肉に関連する基礎的な研究とともにソフトロボットなどへの応用に関する研究も実施しています。
