
適応学習システム制御学
当研究分野では、複雑なタスクを遂行できるロボットの実現を目指し、問題解決能力、意思決定から環境認識まで高度な知的機能に関する基礎研究をしています。さらに、ロボットの社会実装を目指し、医療やリハビリテーションなどの領域への応用研究もおこなっています。
 |
|
|---|
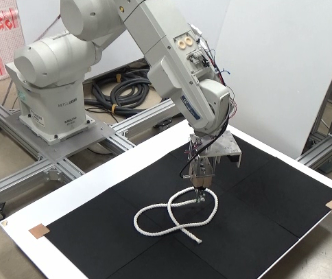
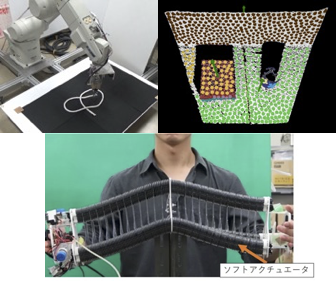
マニピュレータロボットによるひも結び作業
人間の手の機能をロボットで実現するマニピュレータロボットを研究しています.柔軟物体であるひもやロープを人の介在がなく自在に操るための,センサシステムや内部モデルを構築することが重要となります.また,医学部との共同研究でCT透視下IVRロボットの研究もおこなっています.
