
バイオロボティクス学
生物のように環境への高い適応力をもつロボットや,人と協働するロボット,あるいは人に適用するロボットの研究開発をしています.例えば,生物の蛇のように様々な環境を移動できるヘビ型ロボットや,災害対応レスキューロボットの研究開発を行っています.また,遠隔操作で針を刺す医療ロボットや,ソフトアクチュエータを活用したリハビリテーション装置を研究開発しています.
 |
|
|---|

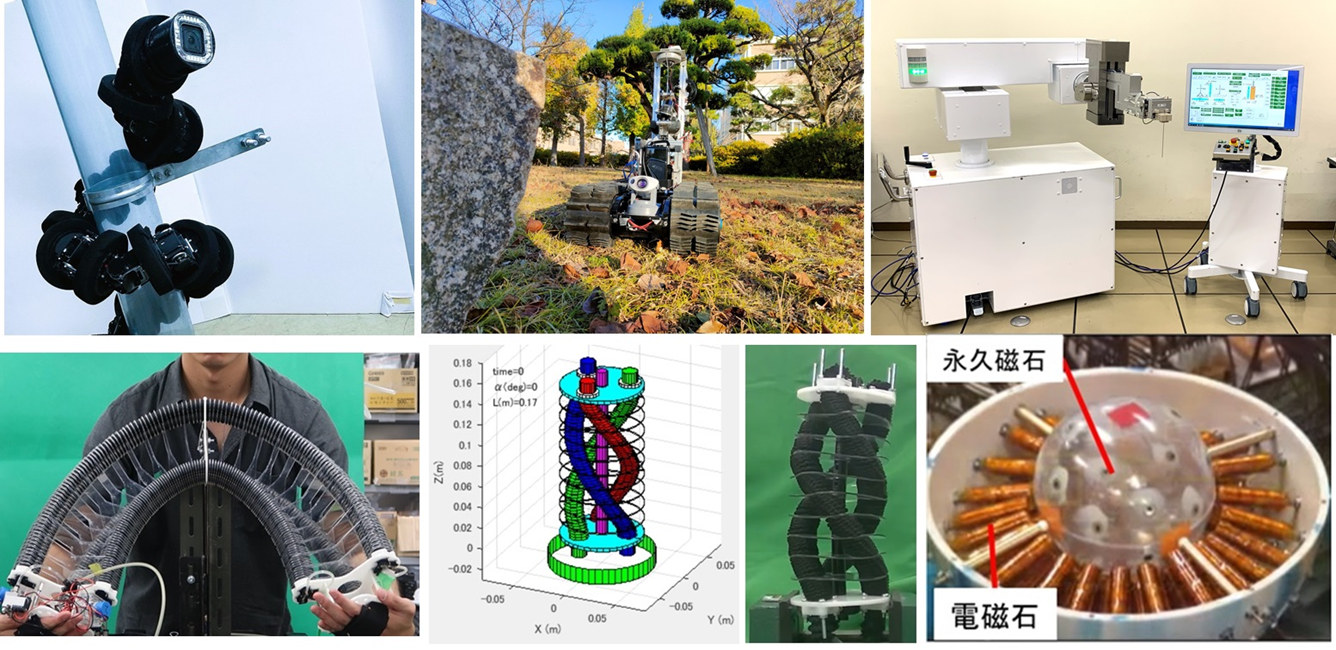
狭隘空間を探索するためのヘビ型ロボット
生物のしなやかさ(メカニズムや制御)を工学的に再現することは,ロボット工学の大きな目標の一つです.私は生物の蛇を模倣したヘビ型ロボットの研究開発をしています.大規模災害で倒壊した複雑狭隘な建造物の内部を調査するロボットを開発することが私の夢です.また,遠隔地の情報収集をするレスキューロボットや,CT透視下に針穿刺を行う医療ロボットの研究開発も行っています.
