
システム制御学
システム制御理論は社会を支える基盤技術です。その対象分野は機械系にとどまらず、電気/情報/化学系など多岐に渡ります。私たちの研究室ではサイバー空間と現実の融合からなるSociety 5.0の実現を目指し,本研究室では非線形制御理論やデータ駆動制御などを中心に,新しい制御理論の創出を目指した基礎研究から社会実装に向けた応用研究まで幅広く研究しています。
|
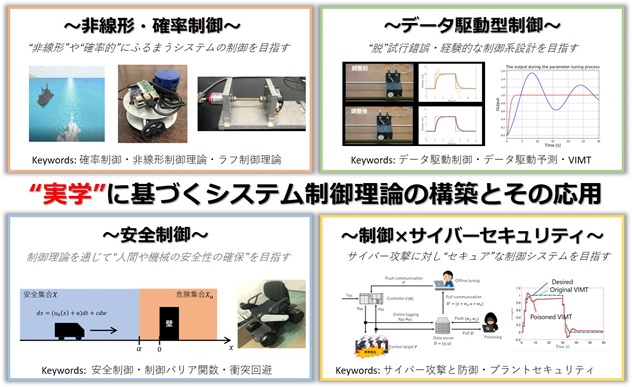
時間の経過とともに状態が変化するダイナミカルシステムの解析と制御について扱うシステム制御理論について研究しています。特に、非線形性や確率要素を含んだシステム(非線形システムや確率システム)の安定化や安全化などに着目しています。そして、それを活かした、電動車椅子などのヒューマンアシスト制御、車両ロボットの制御、自動操船、超音波モータのサーボ制御などの応用問題も行っております。
 |
|
|---|
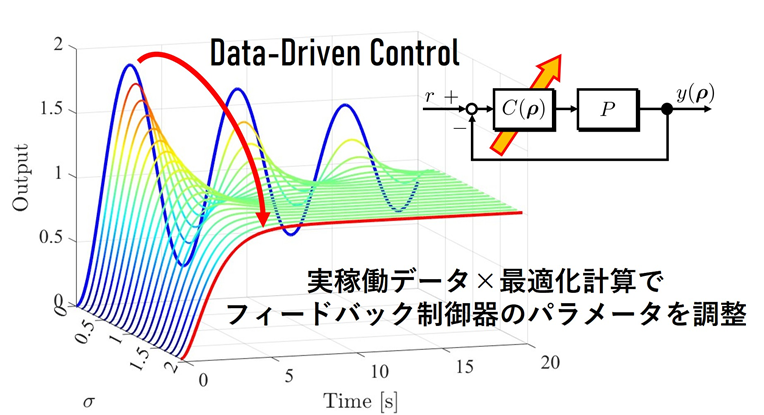
制御対象のモデルが得られない状況では経験的または試行錯誤的な制御系の設計や調整をせざるを得ない状況があります。そのような状況においても制御則の設計や調整を行う方法として、データ駆動制御があります。測定した時系列信号を用いて直接的に制御則を設計・調整することが可能で作業の効率化などが期待でき研究が進められています。データ駆動制御を中心に、より良い制御則を求める方法とその応用について研究しています。
