
システム構成学
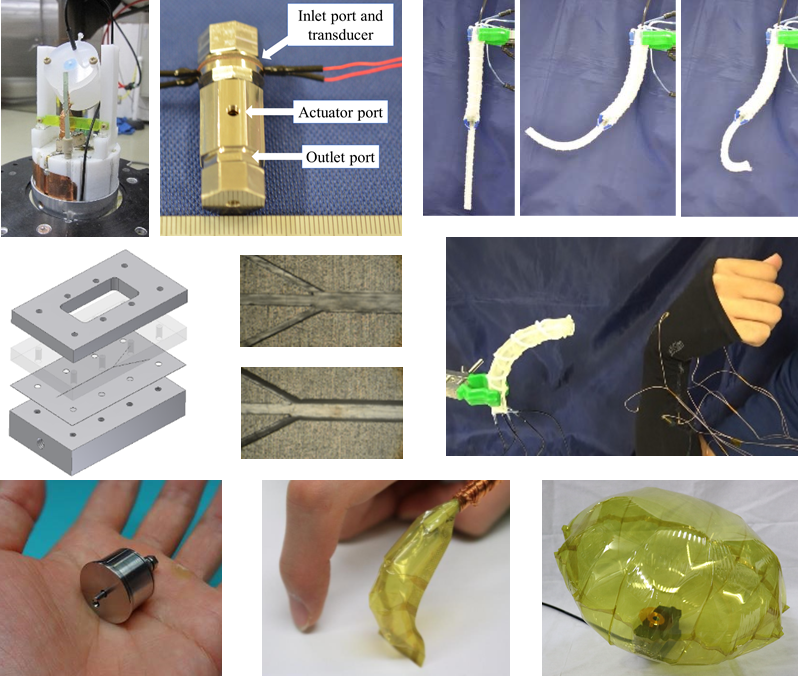
アクチュエータを核としたメカトロニクス用要素技術とそのシステム応用に関連して、マイクロアクチュエータと特殊環境メカニズム応用、マイクロリアクタとマイクロ流体デバイス、空気圧人工筋の高機能スマート化とソフトメカニズムの医療・福祉応用デバイス、フィルム材料・加工技術を利用した極限環境用アクチュエータと宇宙探査機用デバイス等の研究課題に取り組んでいます。
 |
|
|---|
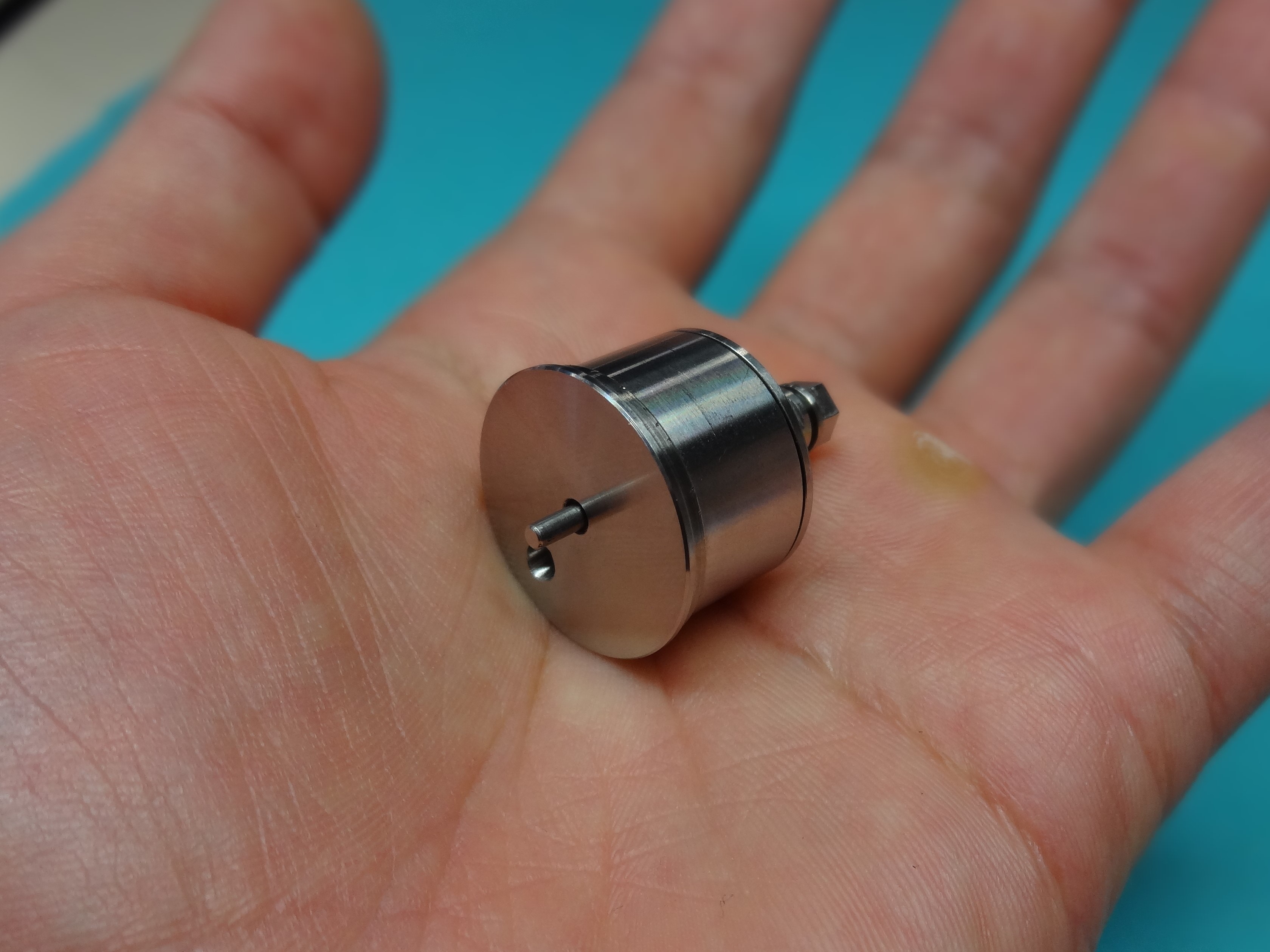
極低温環境での駆動を実現した小型の超音波圧電振動子を駆動源とするモータ
圧電体などの固体の微小な変形を利用するアクチュエータをマイクロシステム・メカニズムへ応用しています。極低温・強磁場環境で利用可能なマイクロアクチュエータや、マイクロ流路内で物体を操作する技術、柔らかい構造を持つセンサなどに関する研究を行っています。
 |
|
|---|

ポリイミドフィルムを利用した極薄・極軽量で柔らかな極限環境用ソフトアクチュエータ.これまでに,温度78K下での駆動を実現
従来,溶着が困難であったポリイミドフィルム同士の前処理・添加剤・接着剤フリー溶着を実現することで,極限環境用アクチュエータを研究しています.またフィルム製ロボット技術をFilmotics(Film + Robotics)と名付け,極薄・極軽量な特性を活かしたロボットの実現を目指しています.
