
メカトロニクスシステム学
メカトロニクスシステム学研究室では、新しいセンサやアクチュエータの創造的かつ基礎的な研究開発、それらの技術を用いたロボットや医療福祉機器などの応用的な研究開発、さらにはそれらの周辺技術の研究開発に取り組んでいます。 特に、圧電効果を駆動原理とするセンサ・アクチュエータに着目し、駆動理論などの基礎的研究から、新デバイスの設計開発評価、さらにはそれらを応用したロボットの制御などの応用的研究までを研究の範囲としています。
|
|
 |
|
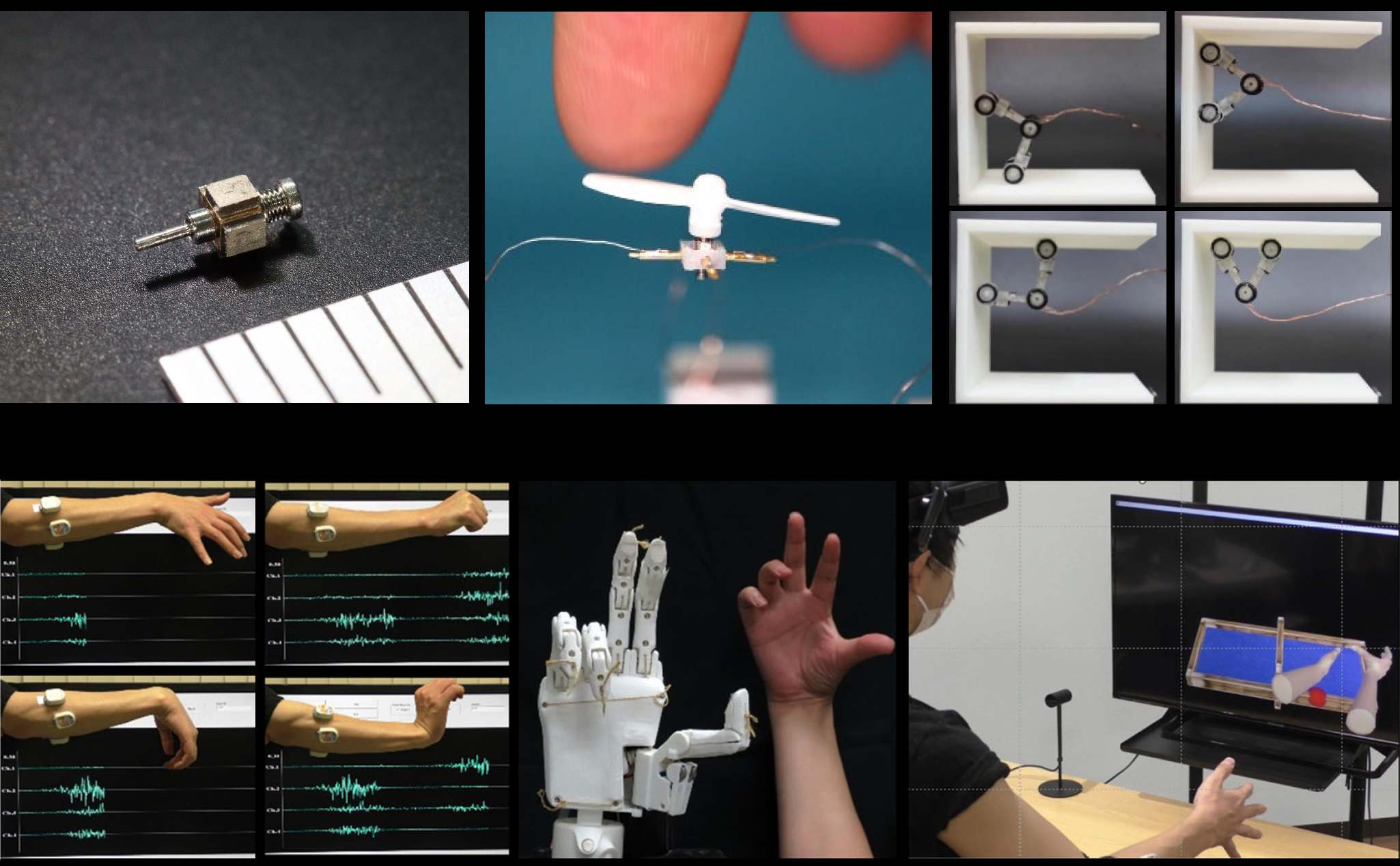
超音波モータの小型化と高性能化について、小さいものの加工法やアセンブリ技術を含め、研究しています。 現在までに、約1mmのモータで、約40μNmのトルクを発生することに成功していますが、このサイズでこれほどのトルクを出せるモータは世界的にも他にありません。他にも、ほとんど目には見えないサイズの超小型モータや、直進運動を生み出すリニア型超音波モータなどの研究を行っています。 詳細はこちら
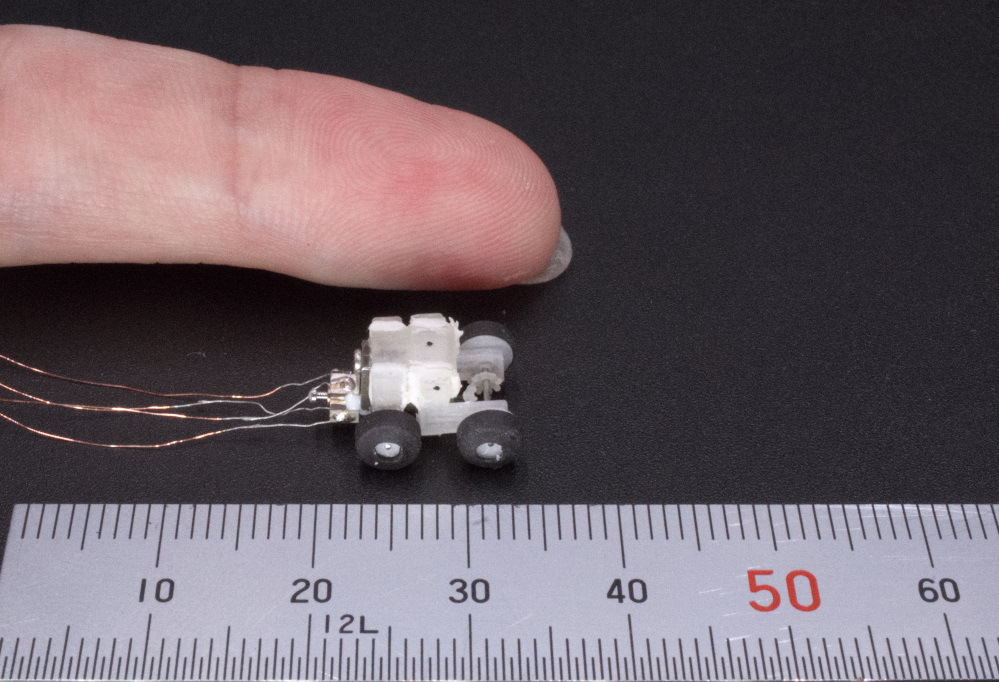
開発したマイクロロボット
開発したマイクロモータを用いて、マイクロ機構やマイクロロボットの開発を行っています。マイクロ超音波モータの出力をマイクロギアで増幅して力が出るようにした超小型の車輪型ロボットや、昆虫サイズの歩行型移動ロボット、はばたき飛行ロボットなどの開発を行っています。また、医療や農業などへの応用を目指したマイクロロボットに関する研究も行っています。 詳細はこちら
